Für den RoboCup-Wettbewerb 2019 haben wir uns für die Darstellung eines digitalen Kinderzimmers entschieden. Besonders wichtig war uns dabei der Bezug zur Realität und zu unserem eigenen Leben. Dies haben wir durch die Entwicklung verschiedener Roboter verwirklicht. Alle unsere Roboter sind selbst designt und gebaut, dazu wurden z.B. 3D-Druck und Lasercutting genutzt. Besonders dankbar sind wir dabei dem FabLab der Hochschule Ruhr West, dessen Geräte wir benutzten durften und in dem uns eine helfende Hand zur Seite stand. Als Techniken verwenden wir EV3, Arduino und Raspberry Pi, welche wir mithilfe der Programmiersprachen C, Phython und der EV3 Blockprogrammierung programmiert haben. Besonders stolz sind wir in diesem Jahr über unsere selbsterstellte Elektronik, wie zum Beispiel einen Fotowiderstand und einen Spannungsteiler, welcher als Sensor fungiert.
Insgesamt haben wir sechs Roboter erstellt.
Rob

Für die direkte Interaktion mit den Menschen ist unser Zimmerroboter verantwortlich. Auch bildet er das Zentrum unserer Kommunikation, er verfügt über ein Bluetooth- und ein Infrarotmodul, sowie die Möglichkeit, über eine serielle Schnittstelle zu kommunizieren. Zudem kann er sich mithilfe von vier Motoren bewegen und hat weitere Gelenke für die Arme, Hände und den Kopf. Im Kopf besitzt er außerdem zwei LED-Matrizen, mit denen er Gefühlsregungen anzeigt. Zusätzlich kann er seine Bewegung mithilfe eines Ultraschallsensors und eines Fotowiderstands wahrnehmen.
Der Kleiderschrank

Der Kleiderschrank besteht aus einem Arduino Mega. Er hat 8 RGB LED’s mit denen er Angaben zur Farbe und zur Verfügbarkeit der Kleidung treffen kann. Er kommuniziert über Infrarotsignal mit dem Zimmerroboter. Zudem besitzt er einen RFID-Reader, mit dem er RFID-Tags bestimmen und der zugehörigen Person zuordnen kann. Je nachdem kann er reagieren, indem er seine Farbanzeige ändert und gegebenenfalls den Zimmerroboter informiert (z.B. bei einem Eindringling).
Der Schreibroboter
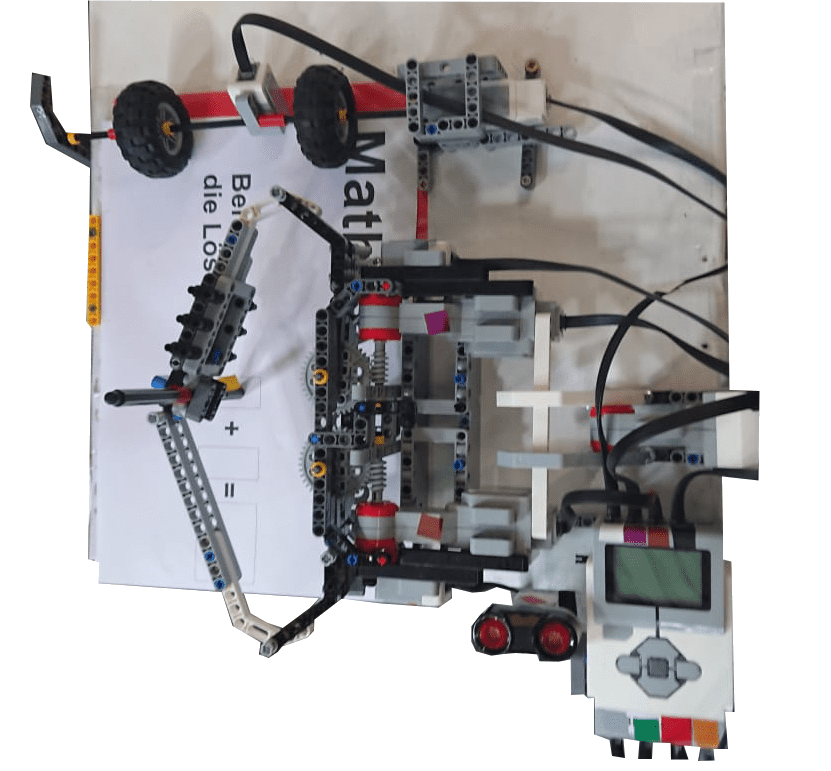
Der Schreibroboter ist ein Gerät, welches selbstständig eine Matheaufgabe lösen kann. Dies schafft er mithilfe von zwei Motoren, Farb- und Drucksensoren, sowie einer Zahnradübersetzung, um die minimalen Bewegungen zu steuern.
Zudem besitzt er einen Ultraschallsensor zur Kommunikation mit dem Menschen. Im Zuge dieses Roboters haben wir uns mit maschinellem Lernen beschäftigt, ein Bereich, den wir auch im Folgenden noch näher kennenlernen wollen.
Der Schreibtischverwalter
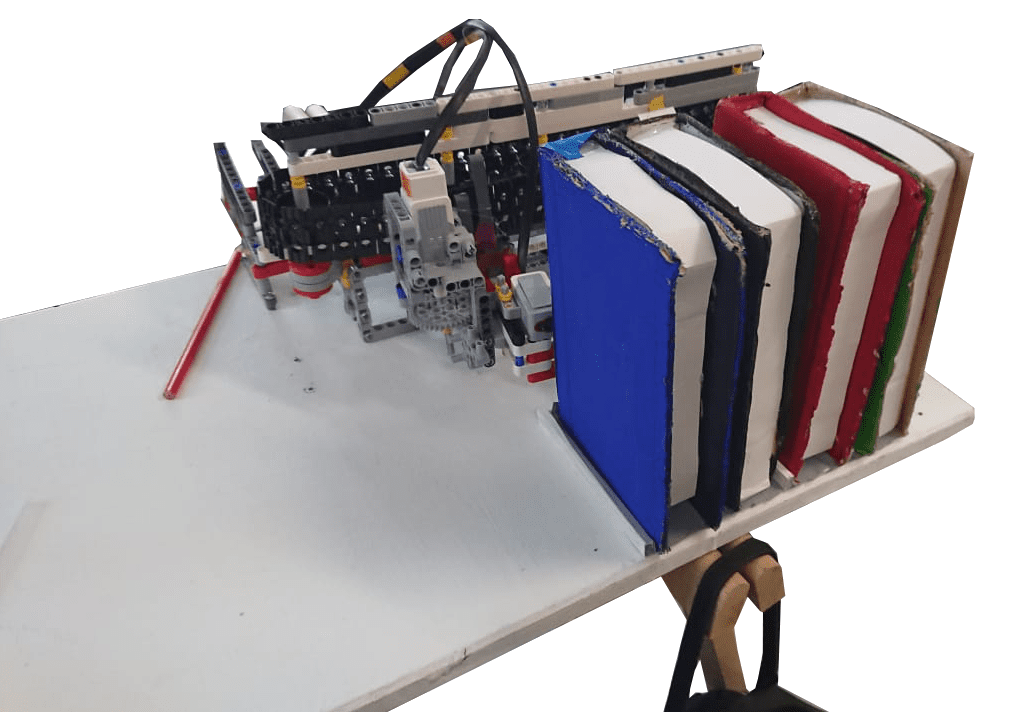
Der Schreibtischverwalter ist ein interaktiver Roboter, welcher über Bluetooth mit dem Roboter des Stundenplans kommuniziert. Er besitzt einen EV3 Stein, drei Motoren, 2 Drucksensoren und einen Farbsensor, mit dem ihm möglich ist, die farbigen Bücher den Nachrichten des Stundenplanroboters zufolge zuzuordnen und die für den Tag benötigten Bücher vom Schreibtisch runter in die Tasche zu schieben.
Der Stundenplan
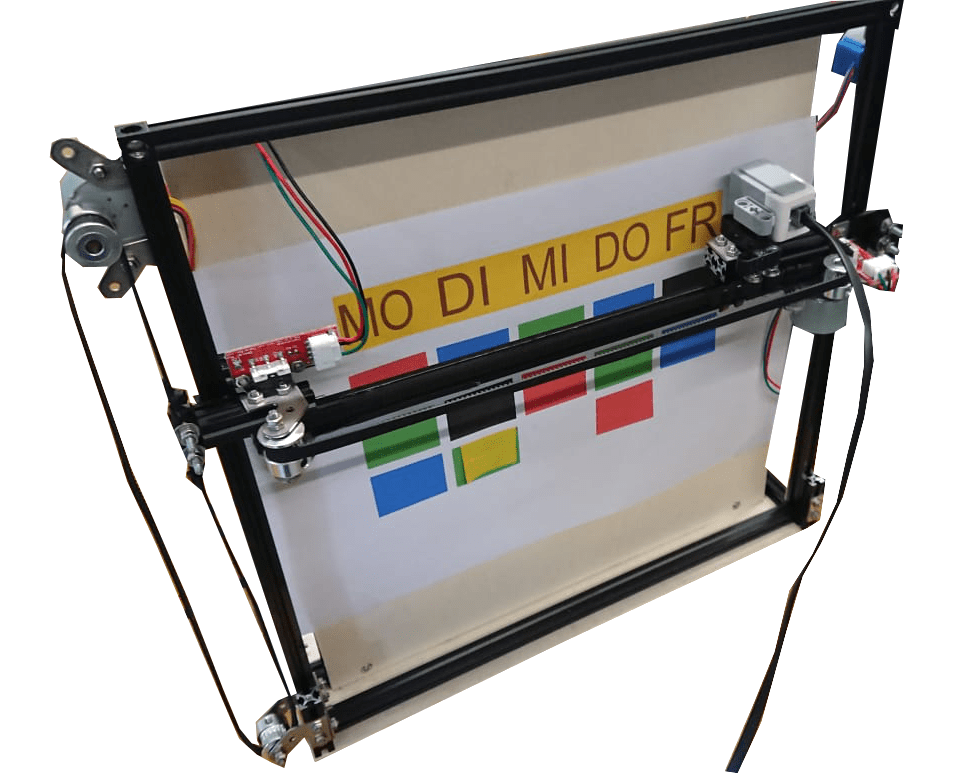
Der Stundenplan besteht aus einem Arduino und einem EV3-Stein, welche über einen Drucksensor miteinander kommunizieren. Er kann über einen selbstgebauten Spannungsteiler, welcher von einem Menschen bedient wird, erfahren, welcher Tag ist und die zugehörigen Stunden durch einen Farbsensor auslesen und per Bluetooth an den Schreibtischverwalter senden. Die Bewegung entspricht dabei der eines Druckers und wird von drei Schrittmotoren und zwei Tastern ausgeführt.
Die Kamera
Die Kamera ist der einzige Raspberry Pi in unserem Projekt. Sie verfügt über eine Kamera, mit der Gesichter erkannt und somit Eindringlinge identifiziert werden können. Sie kommuniziert zusätzlich über Bluetooth mit unserem Zimmerroboter und kann dadurch wichtige Statusmeldungen anzeigen.